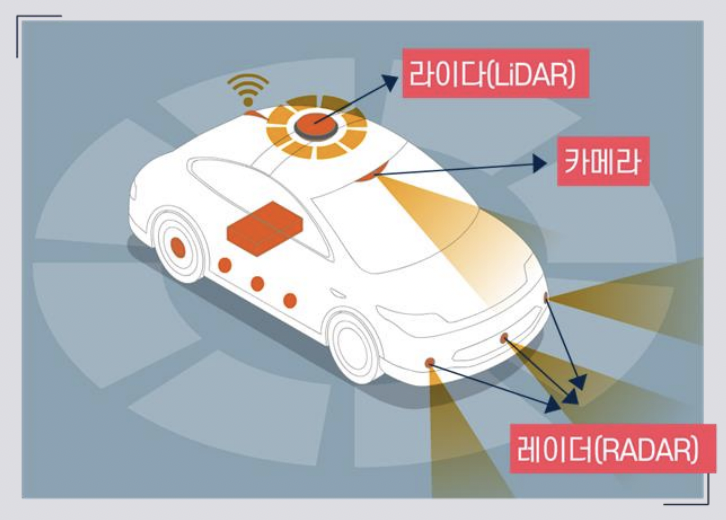
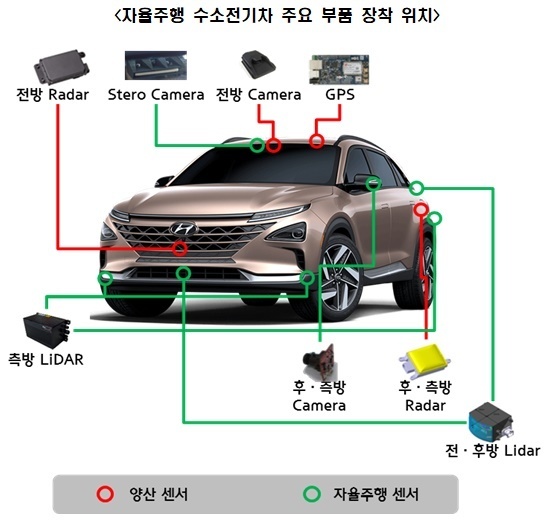
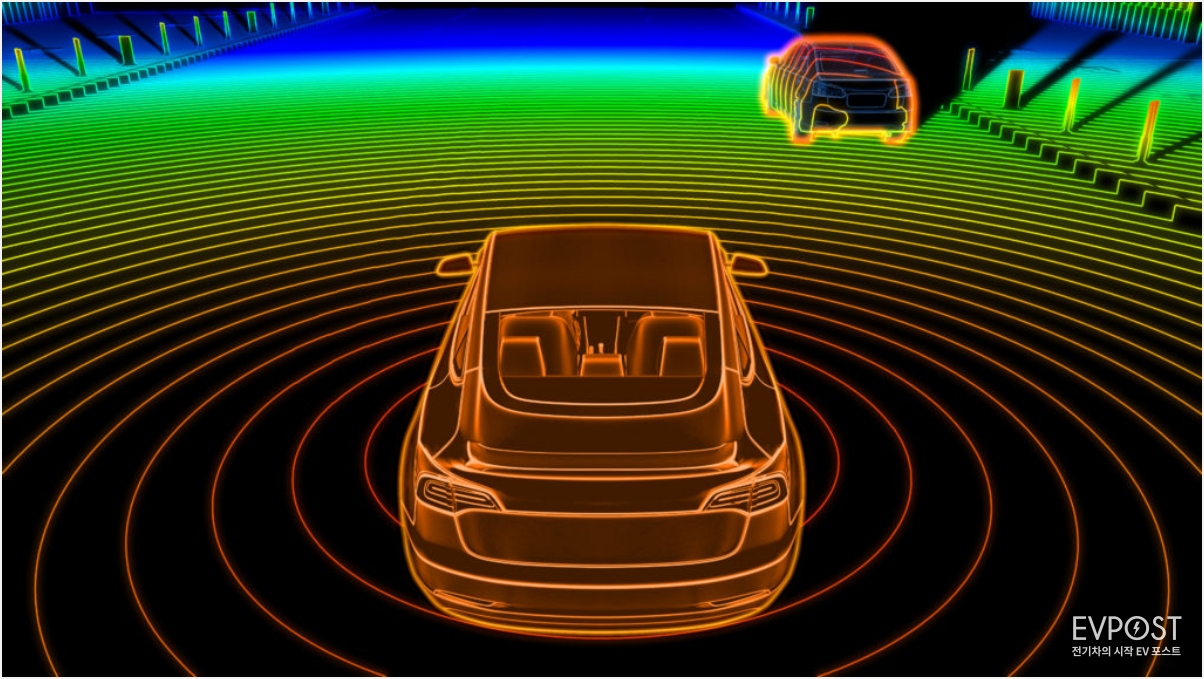
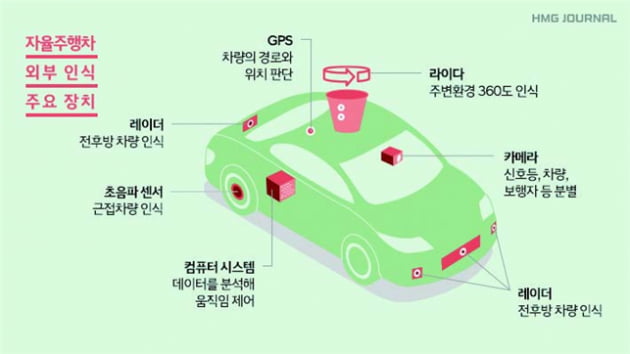
자동 운전 차는 인공 지능과 센서를 활용하고 도로 상황을 인식하고 조종하는 차량입니다.이런 자동차의 동작 원리는 크게 센서, 지도 데이터, 인공 지능 알고리즘 등으로 나누어집니다.우선, 센서는 자동 운전 차의 중요한 요소입니다.라이더(LIDAR)센서, 카메라, 레이더 등 다양한 센서를 통해서 주변 환경을 감지하는 데이터를 수집합니다.라이더 센서는 주변의 거리, 속도, 방향 등을 정밀 측정할 수 있는 도로 상황을 실시간으로 파악하는 데 사용됩니다.카메라는 도로 표지판, 신호기, 차량 등을 인식하고 도로 상황을 분석합니다.레이더는 주변 차량 속도, 거리, 방향 등을 파악하고 충돌 위험을 예측합니다.다음으로 지도 데이터는 자동 운전 차가 도로 상황을 이해하는 데 중요한 역할을 합니다.지도 데이터는 도로 표면, 차선, 사거리, 신호기의 위치 등을 포함한 GPS 같은 위치 정보와 연동하고 자동차의 정확한 위치를 파악할 수 있습니다.이로써 자동차는 실시간으로 도로 상황과 운행 경로를 계획할 수 있습니다.마지막으로 인공 지능 알고리즘은 센서로부터 수집된 데이터를 이해하고 처리하는 역할을 합니다.딥 러닝의 같은 기계 학습 알고리즘에 의한 자동차는 주행 경로를 설정하고 주변 환경을 예측할 수 있습니다.예를 들면, 카메라로부터 수집된 영상 데이터를 분석하고 차선을 인식하고 라이더 센서로부터 수집된 데이터를 바탕으로 주변 차량과의 거리를 계산할 수 있습니다.이로써 차는 실시간으로 주행 경로를 조정하고 안전한 운행을 할 수 있게 됩니다.자동 운전 자동차의 동작 원리는 이처럼 다양한 기술과 데이터의 통합에서 열립니다.센서를 통해서 주변 환경을 감지하고 지도 데이터와 인공 지능 알고리즘을 활용하고 도로 상황을 분석하고 운행 경로를 설정합니다.이에 따른 운전자의 개입 없이도 차는 안전하게 목적지까지 운행할 수 있습니다.자동 운전 자동차의 발전은 운전 편리성과 안전성을 높이고 혁신적 기술로서 폭넓은 관심을 모으고 있으며 앞으로 더 발전할 것으로 기대됩니다.

자율주행차는 인공지능과 센서를 활용해 도로 상황을 인식하고 조작하는 차량입니다. 이러한 자동차의 동작 원리는 크게 센서, 지도 데이터, 인공지능 알고리즘 등으로 나눌 수 있습니다.우선 센서는 자율주행차의 중요한 요소입니다. 라이다(LIDAR) 센서, 카메라, 레이더 등 다양한 센서를 통해 주변 환경을 감지하고 데이터를 수집합니다. 라이다 센서는 주변의 거리, 속도, 방향 등을 정밀하게 측정할 수 있어 도로 상황을 실시간으로 파악하는 데 사용됩니다. 카메라는 도로 표지판, 신호등, 차량 등을 인식해 도로 상황을 분석합니다. 레이더는 주변 차량의 속도, 거리, 방향 등을 파악해 충돌 위험을 예측합니다.다음으로 지도 데이터는 자율주행차가 도로 상황을 이해하는 데 중요한 역할을 합니다. 지도 데이터는 도로 표면, 차선, 교차로, 신호등 위치 등을 포함하며 GPS와 같은 위치 정보와 연동해 자동차의 정확한 위치를 파악할 수 있습니다. 이를 통해 자동차는 실시간으로 도로 상황과 운행 경로를 계획할 수 있습니다.마지막으로 인공지능 알고리즘은 센서에서 수집된 데이터를 이해하고 처리하는 역할을 합니다. 딥러닝과 같은 머신러닝 알고리즘을 통해 자동차는 주행 경로를 설정하고 주변 환경을 예측할 수 있습니다. 예를 들어 카메라에서 수집된 영상 데이터를 분석해 차선을 인식하고 라이다 센서에서 수집된 데이터를 기반으로 주변 차량과의 거리를 계산할 수 있습니다. 이를 통해 차량은 실시간으로 주행 경로를 조정해 안전한 운행을 할 수 있게 됩니다.자율주행 자동차의 동작 원리는 이처럼 다양한 기술과 데이터의 통합으로 이뤄집니다. 센서를 통해 주변 환경을 감지하고 지도 데이터와 인공지능 알고리즘을 활용해 도로 상황을 분석하고 운행 경로를 설정합니다. 이를 통해 운전자의 개입 없이도 차량은 안전하게 목적지까지 운행할 수 있습니다. 자율주행자동차의 발전은 운전 편의성과 안전성을 높이는 혁신적인 기술로 폭넓은 관심을 받고 있으며, 앞으로 더욱 발전해 나갈 것으로 기대됩니다.

인기글